
FlyJSim Q4XP,是FlyJSim自踏入開發機型模組以來,第二款De Havilland Canada Dash 8-400機型產品。先前在Q4XP上市前已經發布過一次FlyJSim Q4XP的專欄報導。如今要來深入研究一下Q4XP是否如FlyJSim官方所提到,可以讓玩家體驗到更進一步的模擬飛行體驗。
Q4XP相較於原本的FJS Q400 Legacy,除了重新進行3D模組的建模以外,外部材質採用PBR(Physically Based Rendering)並達到4K畫質。此外,航機系統像是液壓、電力、飛航電腦、光源等都經過重新設計。動力方面採用兩具普惠PW150A渦輪螺旋槳(Turbo-prop),最高輸出可達5,000shp。音效面採用FMOD效果讓玩家除了視覺上,更能在聽覺上感受到震撼。全新的機上電子包EFB-JPAD供玩家調配地勤、載重、執行檢查表等工作項目。
外觀 Exterior

Q4XP的機鼻、鼻輪與皮拖管的細節做的非常不錯,擋風玻璃以及雨刷的細節私毫不馬虎,隱約能看到玻璃材質針對外部光源的反射。



航機右側,頭與尾部各一道門可以供地勤作業,可以透過JPAD進行開關,並且有相對應的動畫效果。地停時在翼端放有三角錐增加防撞辨識。

左側,前後各一道登機門,Q400機型的特色之一:自帶梯子,不須依靠地勤設施就能夠上下客。除了翼端以外,左側引擎前、後方各多一個三角錐防止作業時可能發生碰撞。

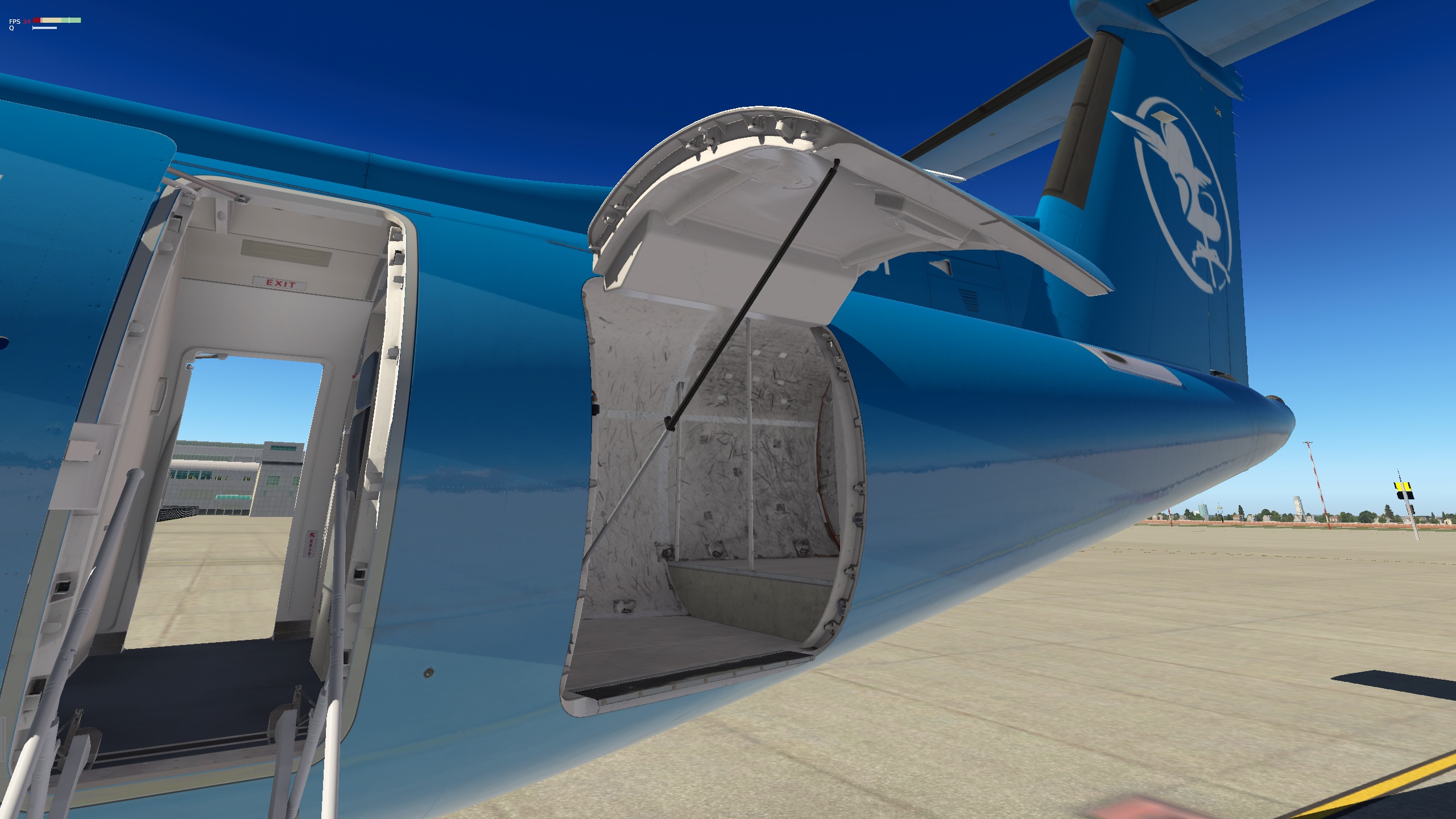
左側機身除了機門外,還有尾部的行李艙門可以放置乘客行李,一共有兩個行李艙,一前一後,可依照需求進行重心調配。這幾道門也可以使用JPAD或是直接點選做開關動作,動作一樣有動畫,而且作動速度相當真實。可以清楚看到機身金屬反射面與PBR效果非常好。另外…主起落架的細節也做的相當精緻。



駕駛艙內裝 Cockpit Interior
駕駛艙平常可以依照需求在JPAD設置開啟時處於冷艙、待機或是準備好起飛的組態。讓玩家可以隨時進入想要的飛行狀況。

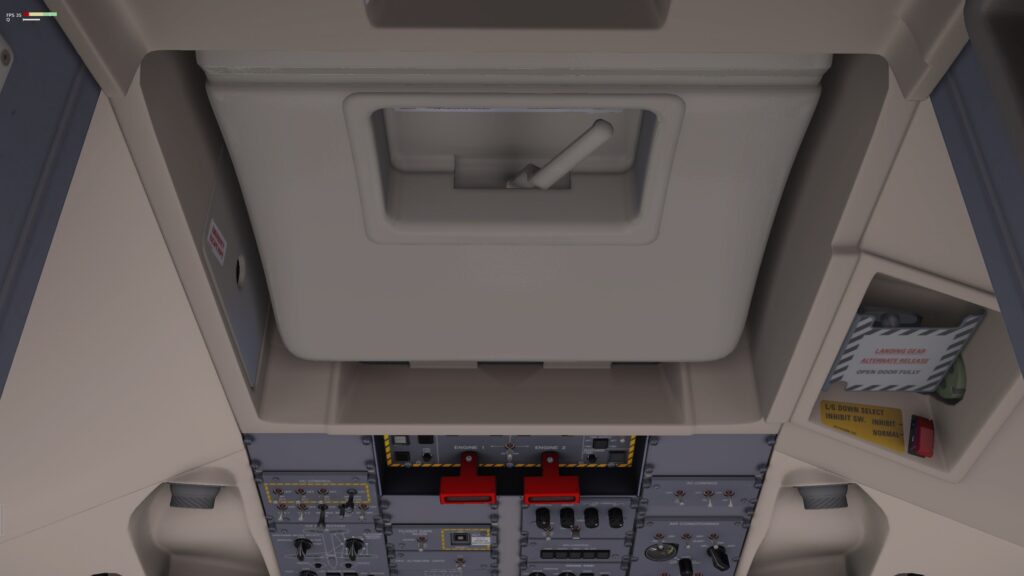
機頂面板(Overhead Panel),材質面處理的很好。Q400主要採用類比旋鈕及撥鍵設計作為航機功能的開關與調整。主要航機功能:電系、除冰、雨天、防火、艙壓、燈光、引擎點火、空調等都配置在機頂。另外還有一大塊警示燈面板以及指南針。

前方儀表面板以及飛行控制面,主2副2中間1一共5塊液晶顯示面板提供飛航資訊,以及第三套備用資態儀,此外還有起落架及指示燈、地面近迫警告系統設定、液壓控制。
上方飛行控制面有擾流板、螺旋槳指示燈、防滑制動器、MFD旋鈕、飛控電腦開關以及自動駕指令扭。此外還有左右各一Caution警示燈以及航機最不可或缺的一項儀器:時鐘。
在PFD兩側,有指示控制面板,可以在PFD上設定速度標示(Speed Bug)、高度指示計撥定(BARO)、以及決斷高度(DH)/最低決斷高度(MDA)。


中控台前側(Forward Center Console),左右各一台UNS-1Ew飛航管理系統與EFIS控制台。以及燃油控制系統、引擎控制系統、一套備用VHF無線電通訊系統、座艙錄音系統CVR,以及飛行控制分離把手(Flight Control Disconnects)。
中控台後側(Afterward Center Console),左右各一套音效及無線電控制單元(ARCDU)、中間由上到下為:配平控制台(Trim Control Panel)、引擎與系統整合顯示控制台(ESCP)與天氣雷達控制台。


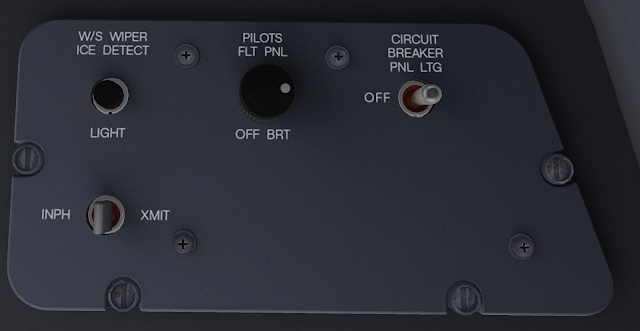
左側駕駛位的控制檯面有鼻輪控制盤(Nosewheel Steering)、八個控制開關(雨刷偵測、ADC測試、鼻輪控制連接、左側斷路器燈源、左側飛行面板燈、螺旋槳超速調制器以及施速警告測試)。
右側駕駛位的控制檯面也有四個容易被遺忘的控制開關:右側雨刷、右側面板燈、右側斷路器燈源以及麥克風/手持無線電選擇鍵。

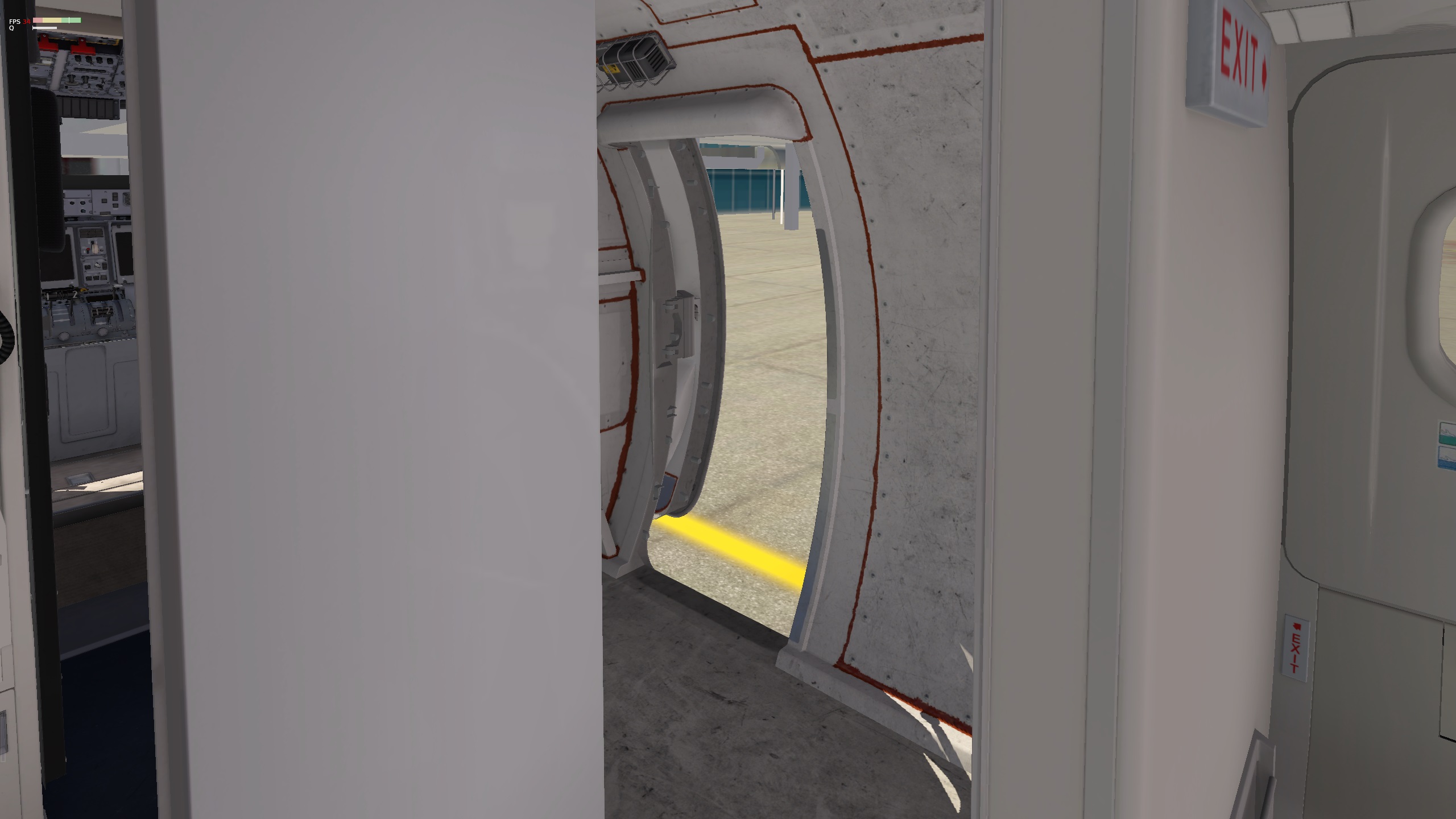
轉到駕駛艙向內看的視野,飛行員後方有航機手冊、滅火器、破窗斧、飛行前拆除pin、航電主機、斷路器以及機頂逃生門。座艙後方有逃生出口以及起落架備用釋出系統,逃生出口採取兩段式開閥,能夠完整打開。




客艙 Cabin
Q4XP座艙配置配有一間廁所,建模細緻度比其他客機好上不少。


前側登機門本身整合樓梯可以供空勤組員或地勤人員直接使用,開關門有動畫做動。側邊拉桿把手在機門關閉後會自動進入鎖上位置。


前行李艙艙門,可以開啟進入行李艙,地勤人員可以直接從右側機門裝載拖運行李。

頭排有緊急逃生出口,較為可惜的是這扇逃生出口並沒有動畫也無法做動。座位配置採單艙等2-2,一共76人座。


每個座位扶手內含收放小桌板可以供乘客放置個人物品,每個座位都可以獨立做動;機頂的個人行李置物櫃也可以做動,採上開式,令人驚豔


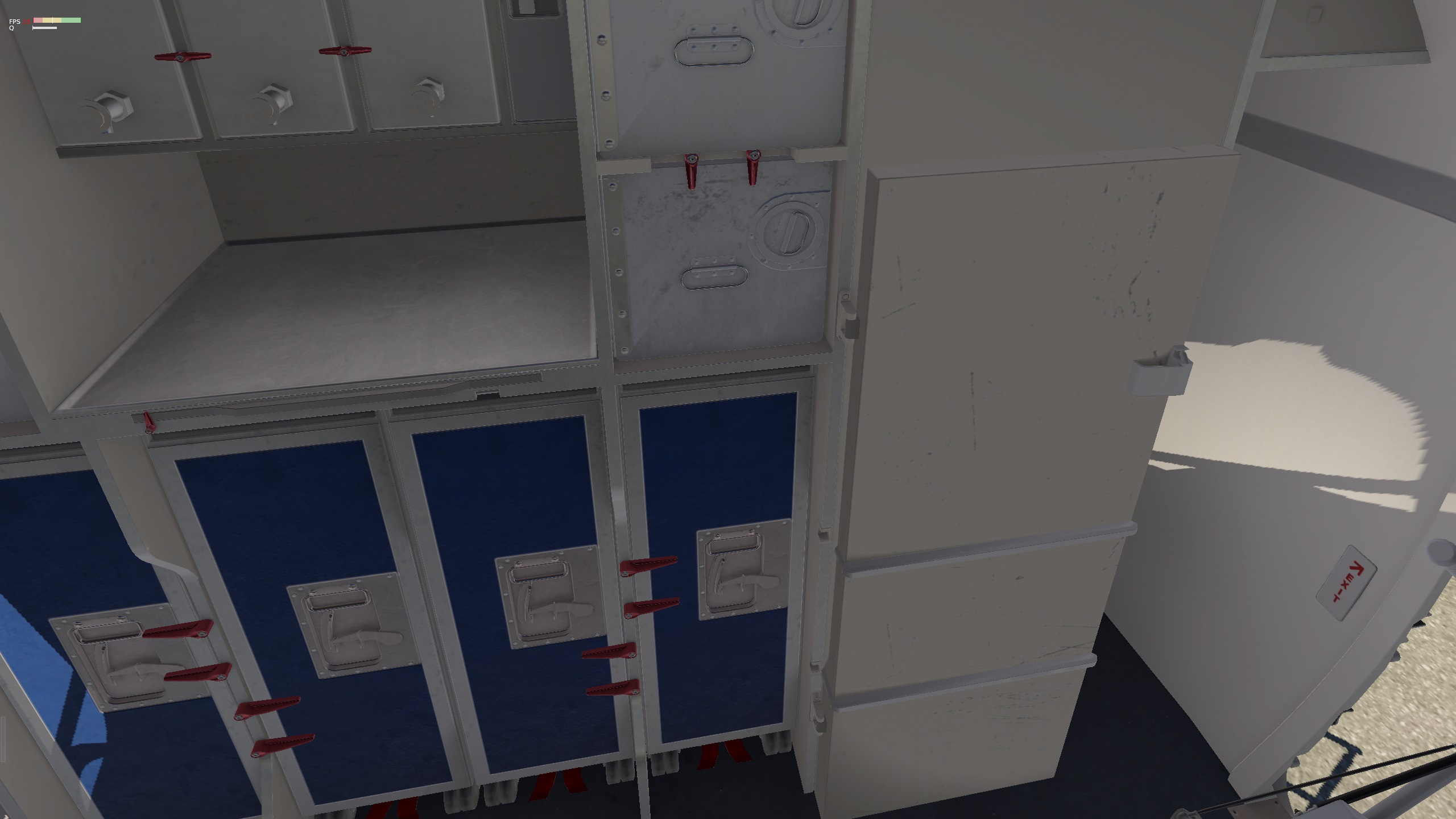
機尾的組員Galley,配置一個活動式組員座位提供起降時使用,其餘時間可以收起來方便組員作業,細節度尚可接受。此外左右各一個機門分別提供地勤餐車與一般人員使用。

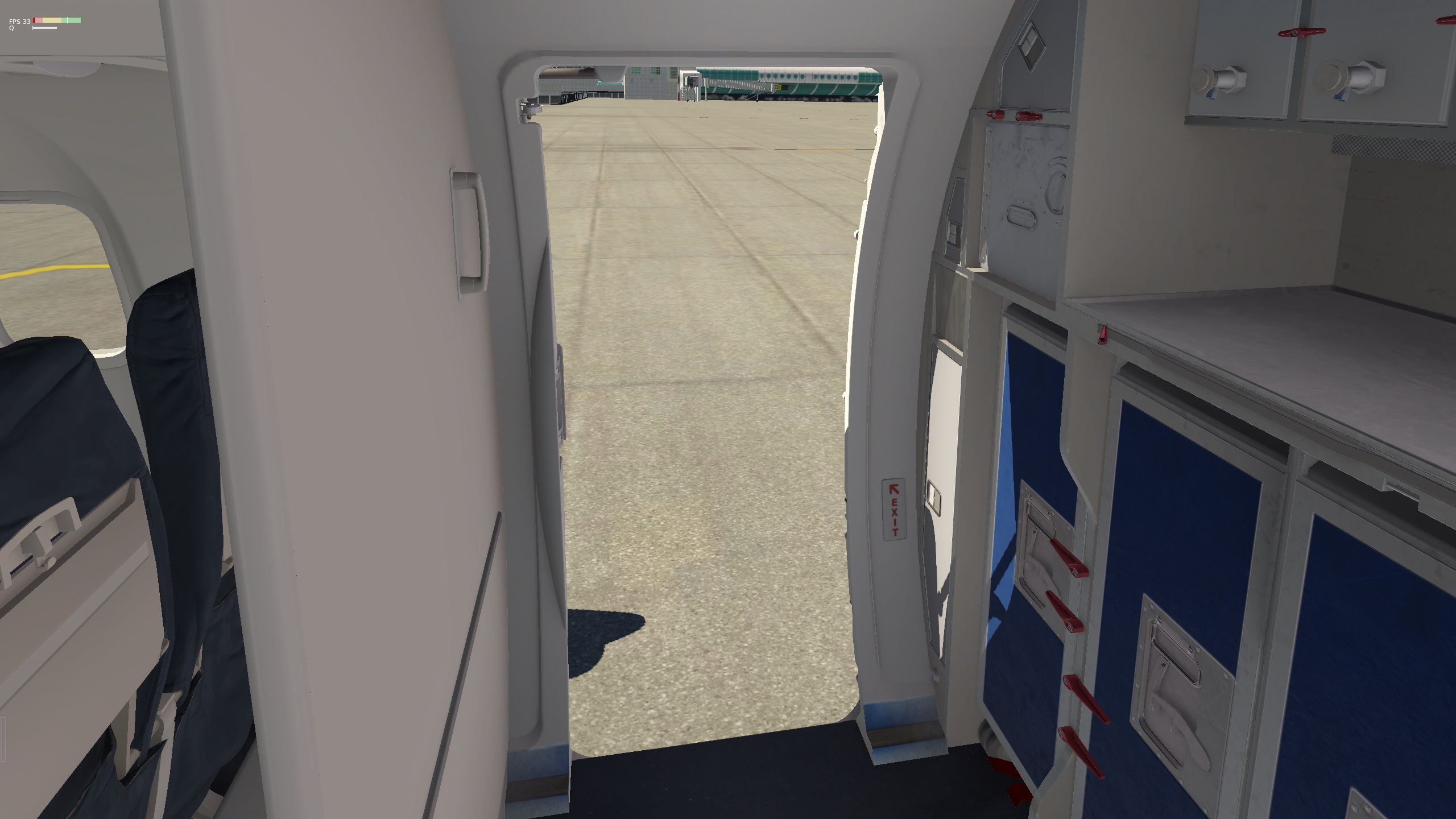

機尾右側的登機門與前方設計不同,採用客梯、機門分離設計。梯身收起後透過滑軌移至側方收納空間,再把機門關閉上鎖。動畫作動一樣讓人驚艷不已,Q4XP在這項細節做到無人能及,甚至你不想飛想當空服…也可以。



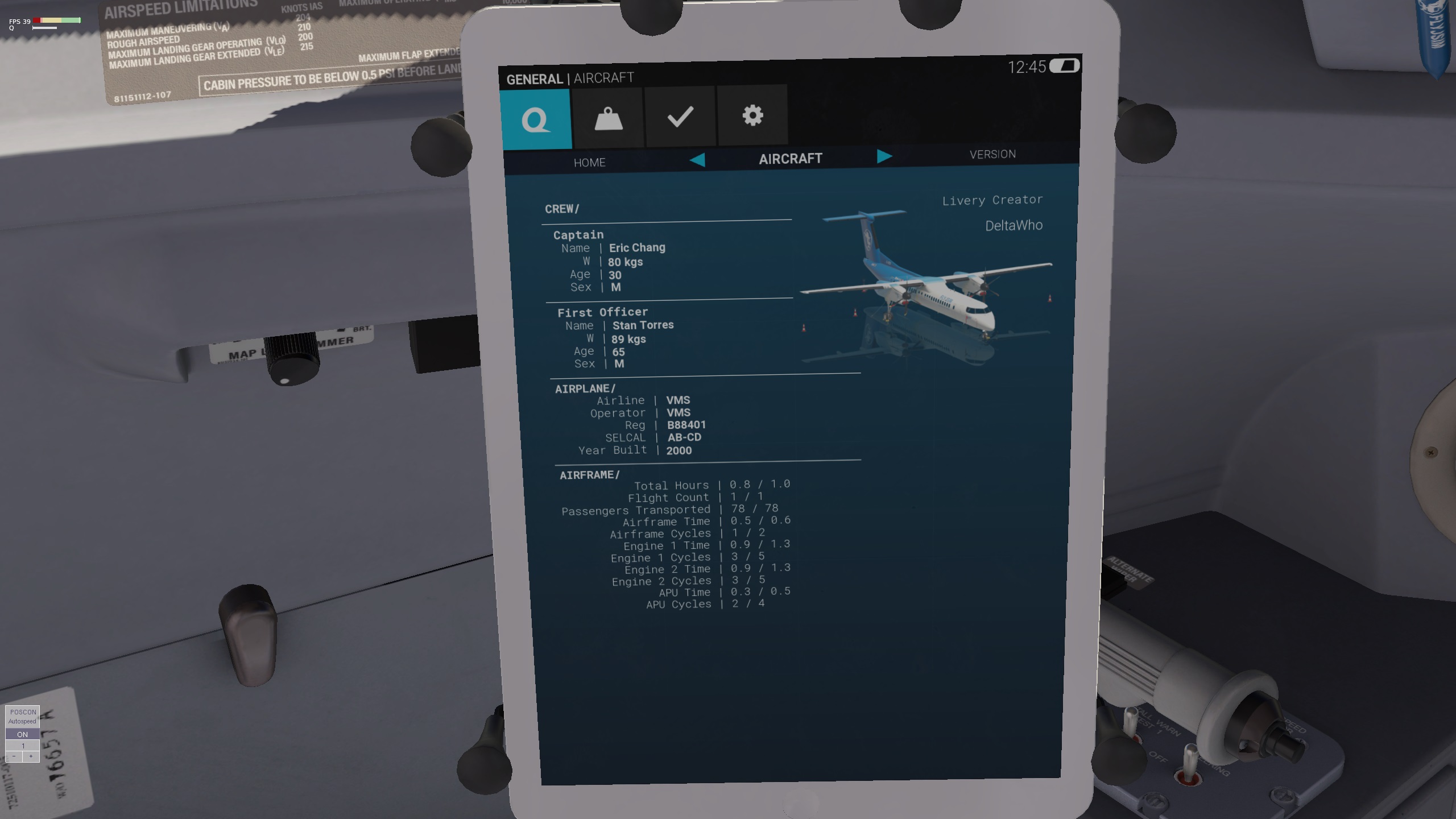
電子飛航包EFB及地勤與客艙控制
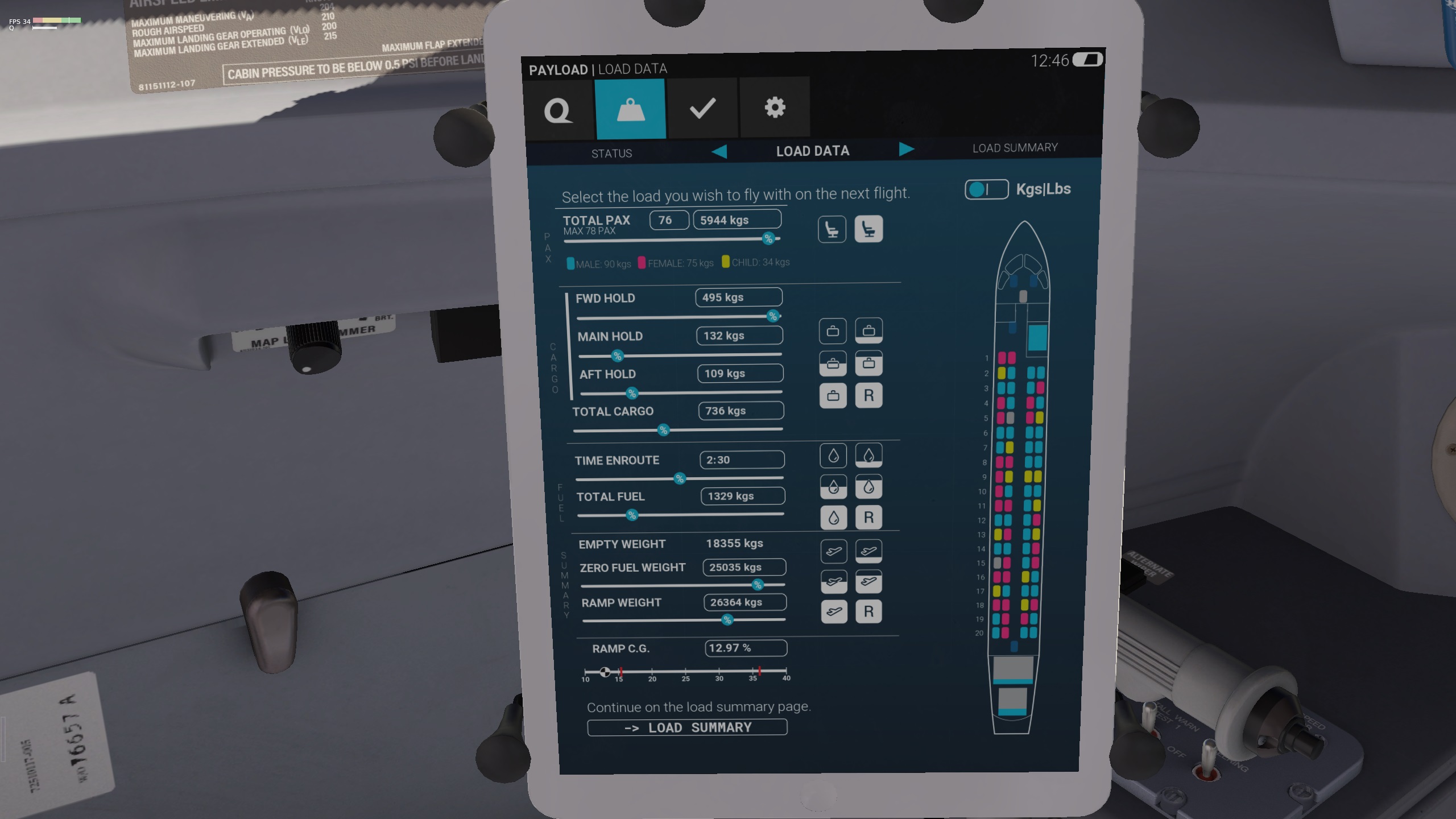
Q4XP的地勤、載重等額外的操控都被整合在機上電子飛行包EFB系統-JPAD中。
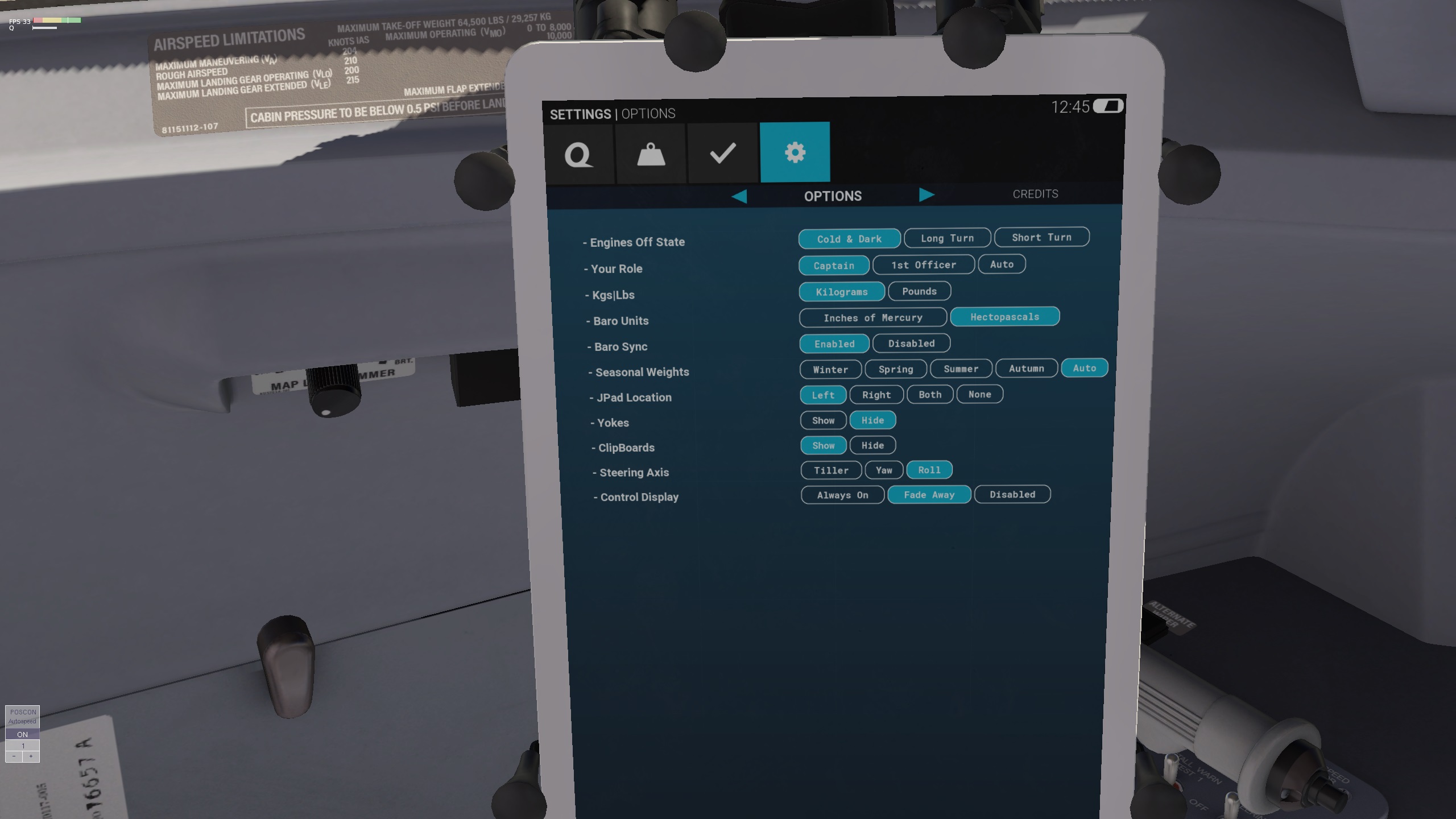
系統內可以設定有關啟動狀態(冷艙、熱艙或準備起飛的模式)、換算單位、儀表同步高度撥定值等;以及調整載重、確認油料還有地勤(呼叫GPU)、後艙控制與狀態顯示。
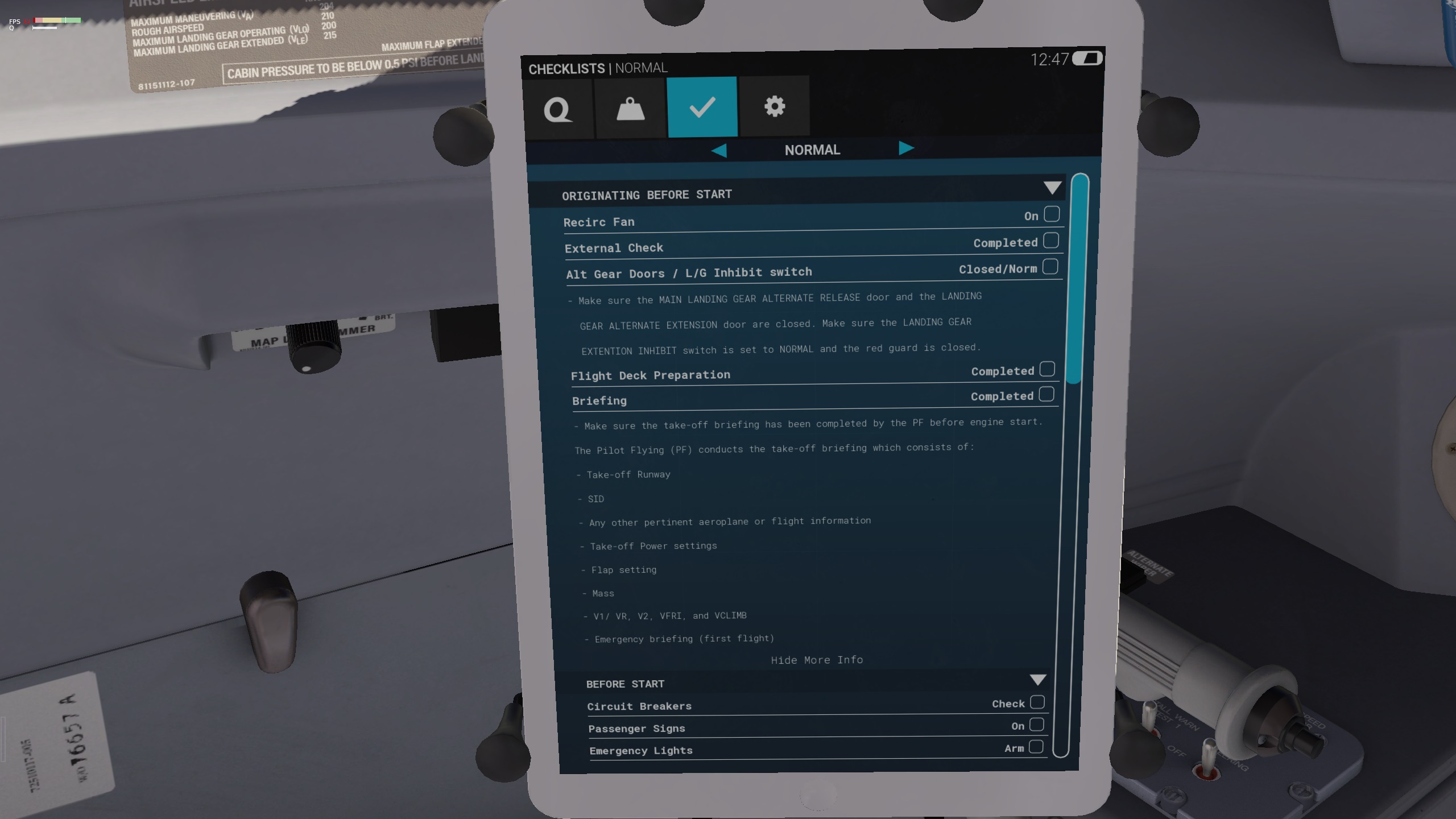
此外,JPAD也整合的官方提供的檢查表供玩家使用,如果不確定程序有沒有做確實,就需要依靠它來確保飛行安全。

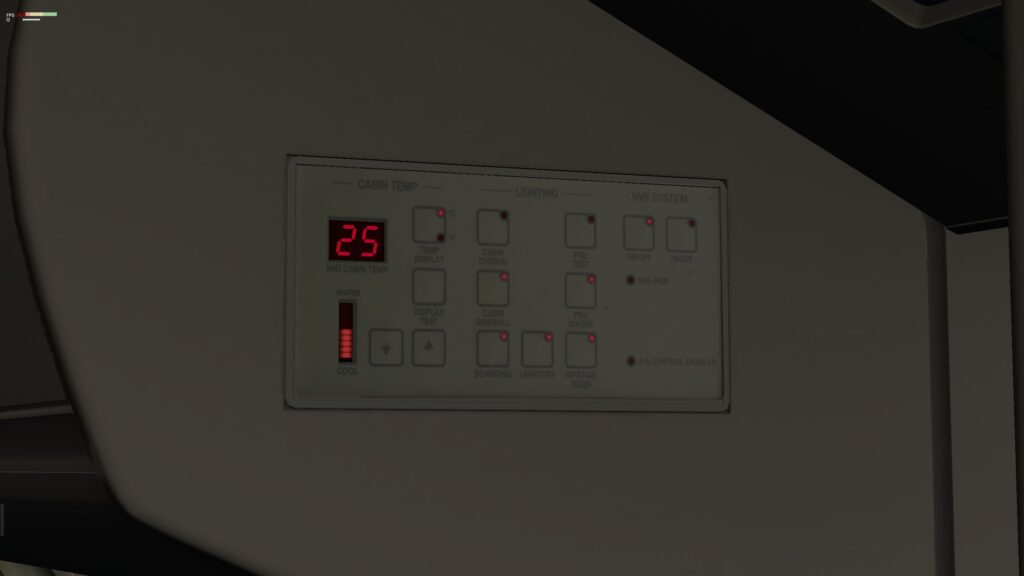
另一個客艙有關的控制系統:燈光系統以及空調,則是在客艙靠近登機門的左側行李櫃上有個電子面板可以進行調整。
飛行測試 Flight Review
此作業程序並未經過任何龐巴迪官方或航空公司認可,僅供本文測試使用,讀者請勿將此程序用於現實航空飛行之中
首先,在JPAD上選擇接上GPU,可愛的GPU車車就會自動出現並幫你通電。通電後,航電面板要手動開機,需要一段時間待開機完成。




接下來執行一些系統測試,首先確認面板燈都正常運作、APU火警、引擎火警系統正常、行李艙煙霧偵測系統也正常運作。然後將地形近迫警告系統(GPWS)測試鍵按住不放進行完整系統測試。






接下來,我們快轉跳過一些測試步驟,來輸入飛航電腦FMS。
Q4XP飛航電腦採用UNS1-Ew系統,在官方提供的手冊中也有一整份文件說明有關FMS的詳細操作方法及資訊說明。
輸入完飛行計畫以後,使用MFD確認到離場、航路航點有沒有錯誤。
同時,你也可以呼叫組員與地勤可以開始進行登機、加油作業,會需要一點時間…





登機作業完成,關門準備要許可後推。同時可以順便開APU斷外電,因為機型比較小,使用小紅車就足夠,不需要螃蟹。


開始後推,在地勤確認沒問題就可以開車囉,我們先從右邊開始發動。
NH15以後把Condition Lever往上到Starter/Feather Position等待引擎進一步進油。Q4XP的特殊設計,當有油門與螺旋槳桿有特殊操作時,畫面右下角會顯示閥門位置移動,讓飛行員能夠不需要移動視角就能掌握狀況。


RPM穩定上升後,可以把Condition Lever推到MAX Position,EICAS顯示NTOP,FF/ITT在正常位置。等待RPM/ITT穩定以後,接下來一樣的開車程序發動另一側引擎…


執行完開車後檢查程序,獲得許可後,就可以開始滑行到跑道準備起飛。
Q400引擎兩具最高可以提供5000p馬力供起飛或緊急狀況使用,不過今天天氣良好載重又輕,採用一般起飛動力(Flight Rating)就足夠。




Q400的爬升速度很快…快到甚至來不及拍照就到了巡航高度。我們這一腿從從高雄小港飛到澎湖馬公機場;接上自動駕駛,很快的做完各項起飛後檢查、爬升檢查跟巡航檢查,位置正在西港VOR南25浬,巡航高度8000呎。



經過西港後,自動駕駛系統將飛機往左轉,直直前往澎湖。飛過澎湖的都知道,在馬公13浬時需要做ARC進場,難不倒Q4XP的自動駕駛,維持弧形畫圓準備走02跑道ILS進場。


然後….對正跑道解除自動駕駛飛的太開心就忘記紀錄了,想起來的時候已經是落地後的事了。

不過沒關係,還有一腿夜航從馬公回小港。
夜航紀錄與航機燈光系統
不到晚上通常看不出來燈光系統以及PBR材質在完整HDR下的光影效果,所以飛一腿夜航是一定要的,這是夜晚的駕駛艙。(由於馬公機場地景基礎燈光設施不足,改於小港機場拍夜照)

一人一顆史爸賴(Spot Light),左側一顆,右側一顆,座艙門口也一顆。



從外部看起來的效果非常美,只差沒有把機師做3D建模;而機頂面板在夜晚燈光下稍微亮度不足…但可接受。


客艙的緊急照明系統,提供緊急情況逃生疏散使用;廁所也有做獨立燈源,乘客不需要摸黑上廁所。


外部燈源全開下在機場燈光的加持,金屬反射面非常漂亮。

中間省略掉繁雜的過程,開車後推後很快地又到了跑道上,比較一下開滑行燈(Taxi Light)以及的開啟落地燈(Landing Light),光源及強度非常真實。



起飛很快地又到了巡航高度,定向西港準備進場,到旗津外海維持3200呎,準備轉彎攔截訊號..



攔截上後PFD顯示LOC* & GS*,通知塔台取得許可。

400呎跑道頭,小幅度修正對正跑道中心線…Minimum…然後…落地!擾流板(Spoiler)自動部屬,由於跑道夠長就不使用反槳了。




脫離跑道後開啟APU,滑行回航廈,然後…關車!感謝各位今天搭乘VMS航空。




總體評價 Overall Rating
測試期間中使用1.0.8版進行測試,部份BUG已經獲得修正,因此不會特別納入特定BUG的表現進評分。
外觀/材質/音效等聲光體感
Q4XP在處理3D建模與音效上做的非常的好,支援4K材質、PBR以及FMOD似乎是現在高單價商品的必備品,但論精緻度與細膩度,Q4XP相較於其他同級別產品如A320或B767等絲毫不遜色。材質處理做的非常不錯,毛邊、細緻的刮痕及舊化處理都相當到位,玩家能夠體驗到像是在真實航機上的沉浸感。
航機系統- 電系/液壓/環境
在航機系統上處理,FJS則是下了非常大的功夫,絲毫不馬虎的用許多行的程式碼建構了液壓、電系等系統。在操作不當的時候…也有可能造成失效。電子系統的一些反應性是模擬飛行最常被忽略的細節,例如像按下按鈕時的系統的延遲反應,或是數值上升/下降的速度,在這裡我覺得FJS對這幾項功能下了很大的功夫,每一個斷路器可以對應到相對的電子系統並且…讓它失效,以往在航機模組建立時不被開發商所重視,但似乎現在對評估機模完整性來說是個不可或缺的功能。唯一小缺點在於起落架液壓以及落地彈跳的反應,但這個問題似乎主要在XP本身,希望未來可以更進一步優化。
空氣動力與飛行操作
飛操與空氣動力的測試上,主要飛操面採用Honeycomb Aeronautical Alpha以及Bravo還有Rudder,在航機速度、飛操反應等很好,但是設定檔似乎需要再優化,個人認為官方應該要提供建議的Pitch/Roll以及Yaw的參考輸出值或曲線圖。
航電與自動駕駛系統
這是FJS第一次挑戰現代電子航電系統的產品,毫不馬虎,非常非常令人滿意,FMC絕對會讓玩家嘖嘖稱奇,在PFD/MFD的操作,與一般玩家所接觸到的Airbus/Boeing邏輯都不太相似,但在熟讀官方給的文件以及相關學習資源後就能上手,而且對航電系統非常滿意。不過在控制邏輯上有一點點問題(BUG),官方也正在努力修正中。
人因設計/EFB/介面以及官方文件
無可挑剔。首先,官方提供的文件內容優良且完整。JPAD的控制及設計非常適用。此外,相較於其他機模,Q4XP特有兩大功能:油門位置顯示以及閥門功能。Q4XP的閥門控制指令概念是首次出現在XP機模上,特別適用於多段式油門設計,透過閥門指令的控制,油門軸會被限制輸出並且維持在檔位內,並且透過油門位置顯示UI,更能讓玩家對於航機有更好的掌控性。模擬出實際飛行的體感。
燈光效果
中規中矩的表現,內、外部燈光都有達到一定的水準,但沒有特別令人驚豔的設計。使用客艙燈源會減低整體FPS效能表現來說有待加強,但不嚴重。
效能表現
Q4XP採用SASL、高精度材質以及各種系統交叉運算,對運算效能本身有一定的負擔程度,在剛推出時有許多玩家反應運行時有異常的CPU使用量且FPS平均下降了30-50%不等,在後續版本改善,有一定幅度的提升,但是在某些時候仍然有不會穩定於20FPS以上的問題。整體而言,效能不足的電腦需要斟酌一下是否有額外的運算能力來負擔此機型,尤其是XP在天氣不好的狀況時對CPU的負擔又是特別沉重。


總體評分
- 模組 – 10/10
- 航機系統 – 9/10
- 空氣動力 – 9/10
- 航電系統 – 9/10
- 可用性工程 – 10/10
- 燈光效果 – 8/10
- 效能需求 – 7/10
官方建議規格
- 平台X-Plane 11 (未來將支援 X-Plane 12)
- 支援Windows, Mac or Linux作業系統
- 顯示需求:4 GB VRAM Minimum – 8 GB+ VRAM Recommended
- 檔案大小:1.5 GB,建議至少保留 5 GB
訂價與銷售通路
FlyJSim Q4XP目前訂價為$79.95美元,在X-Plane.org商店平台獨家販售。
更多有關FlyJSim Q4XP的資訊也可以參考FlyJSim官方網站。
